
WIFI无线网络之抓取WLAN无线报文
WIFI无线网络之抓取WLAN无线报文抓取WLAN无线报文大致需要分3步:
设置无线网卡为Monitor模式。
抓包。
恢复为 Managed 模式。
设置无线网卡Monitor模式什么是 Monitor 模式?Monitor 模式 是一种无线网卡的工作模式,允许网卡捕获所有经过的无线数据包(包括非本设备的数据包),常用于:
网络嗅探(Sniffing)
安全测试(如破解 Wi-Fi、分析协议)
研究无线网络行为
前提条件
需支持 Monitor 模式的无线网卡
需root 权限: 所有操作需以 root 用户执行(使用 sudo 或直接切换)。
查看无线网卡是否支持 Monitor 模式iw list
输出如果包含如下类似的monitor,说明网卡支持:
Supported interface modes:
* IBSS
* managed
* AP
* AP/VLAN
* monitor
停止网络管理服务防止 NetworkManager 或 systemd-networkd 干扰:
sudo systemctl stop NetworkMa ...

Linux WIFI无线网络之MLME浅析
Linux WIFI无线网络之MLME浅析MLME简介
MLME Stands for Media Access Control (MAC) Sublayer Management Entity. MLME is the management entity where the Physical layer (PHY) MAC state machines reside. Examples of states a MLME may assist in reaching:
Authenticate
Deauthenticate
Associate
Disassociate
Reassociate
Beacon
Probe
mac80211’s MLME management implementation is currently handled by net/mac80211/mlme.c. This handles only the client-side MLME.
Linux WiFi MLME(MAC Layer Management Entity) 是 IEEE 802.1 ...
高性能网络之DPDK与RDMA浅析
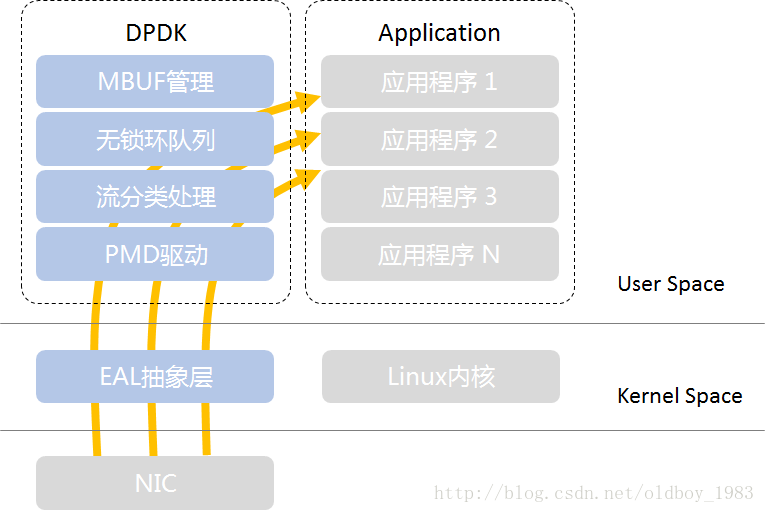
高性能网络之DPDK与RDMA浅析DPDK(Data Plane Development Kit)1. 定义DPDK 是一个 用户空间高速数据包处理框架,由 Intel 发起并开源,旨在绕过内核协议栈,实现高性能、低延迟的数据包处理。
PMD:Pool Mode Driver,轮询模式驱动,通过非中断,以及数据帧进出应用缓冲区内存的零拷贝机制,提高发送/接受数据帧的效率
流分类:Flow Classification,为N元组匹配和LPM(最长前缀匹配)提供优化的查找算法
环队列:Ring Queue,针对单个或多个数据包生产者、单个数据包消费者的出入队列提供无锁机制,有效减少系统开销
MBUF缓冲区管理:分配内存创建缓冲区,并通过建立MBUF对象,封装实际数据帧,供应用程序使用
EAL:Environment Abstract Layer,环境抽象(适配)层,PMD初始化、CPU内核和DPDK线程配置/绑定、设置HugePage大页内存等系统初始化
2. 核心原理
绕过内核协议栈:数据包从网卡直接进入用户空间,避免内核上下文切换和中断开销。
轮询模式:通过轮询而非中断方式处理数 ...

WIFI无线网络之Wi-Fi Direct(Wi-Fi P2P)协议
WIFI无线网络之Wi-Fi Direct(Wi-Fi P2P)协议Wi-Fi Direct 简介
Wi-Fi Direct(Wi-Fi P2P) 是由 Wi-Fi 联盟(Wi-Fi Alliance) 推出的一种基于 IEEE 802.11 标准的无线通信协议,允许设备在 不依赖路由器或接入点(AP) 的情况下,直接建立点对点连接。广泛用于 文件共享、无线投屏、打印、游戏联机等场景。
Wi-Fi Direct 协议栈大致结构+-----------------------------+
| Application Layer | (Miracast, RTSP, UPnP)
+-----------------------------+
| Wi-Fi Direct Layer | (Group Formation, Negotiation)
+-----------------------------+
| IEEE 802.11 MAC | (MAC 层协议处理)
+------------------- ...
WIFI无线网络之BeamForming波束成形
WIFI无线网络之BeamForming波束成形什么是波束成形波束成形,顾名思义,就是一种‘形成’一个‘波束’的技术。波束的意思就是一组天线系统的电磁波辐射模式,简单来说,波束成形就是一个建立天线辐射模式的技术。BF是多天线技术的一种。
波束成形技术是将信号以一种能量集中和定向方式发送给无线终端的技术,能全面改善无线终端接收的信号质量,并提升吞吐量。在Wi-Fi(WiFi)标准中,从Wi-Fi 4(802.11n)开始引入该技术。
看下面这张图,就可以很好的了解波束成形?<case 1>是一个在所有方向辐射近似相等的能量的天线系统,天线周围的3个UE接收到近似相等的能量,但是在没有UE的方向上辐射的能量都会被浪费掉。在<case 2>中,“波束”是特别“形成”的,即在UE方向上辐射的能量要比没有UE的方向上辐射的能量强得多。
Wi-Fi为什么要用波束成形?Wi-Fi标准一直致力于提升无线的传输速率,尤其是从Wi-Fi 4(802.11n)开始引入了MIMO和波束成形技术,让传输速率提升到了数百兆,提升了1个量级。
MIMO技术通过多天线传输,带来传输速率的成倍增 ...
WIFI无线网络之MIMO与OFDMA
WIFI无线网络之MIMO与OFDMAMIMO什么是MIMO?MIMO(Multiple-Input Multiple-Output)是指在无线通信领域使用多天线发送和接收信号的技术。MIMO技术主要应用在Wi-Fi(WiFi)领域和移动通信领域,可以有效提高系统容量、覆盖范围和信噪比。通常讲的M×N MIMO是指发送端有M个天线,接收端有N个天线。
从SISO到MIMOSISO(Single-Input Single-Output)从字面上理解,SISO 就是单发单收,是一种单输入单输出系统,发射天线和接收天线之间的路径是唯一的,传输的是1路信号。在无线系统中,我们把每路信号定义为1个空间流(Spatial Stream)。
SISO示意图由于发射天线和接收天线之间的路径是唯一的,这样的传输系统是不可靠的,而且传输速率也会受到限制。
SIMO(Single-Input Multiple-Output)
为了改变这一局面,在终端处增加1个天线,使得接收端可以同时接收到2路信号,也就是单发多收。这样的传输系统就是单输入多输出,即SIMO。SIMO示意图虽然有2路信号,但是这2路信号是从同 ...
WIFI无线网络之IBSS(Ad-Hoc)模式
WIFI无线网络之IBSS(Ad-Hoc)模式一、IBSS 的基本概念在无线网络中,IBSS( Independent Basic Service Set ) 是 IEEE 802.11 标准定义的一种网络拓扑模式,也被称为 Ad-Hoc 模式 。与常见的 Infrastructure Mode(基础设施模式) 不同,IBSS 允许多个设备在无需接入点(AP)的情况下直接通信,形成一个临时的点对点对等网络。这种模式特别适合临时组网、应急通信或设备间直接数据传输场景。
二、IBSS 的工作原理1. 网络建立
设备发起:某个设备主动创建 IBSS 网络,设定 SSID(ESSID)、信道、加密方式等。
其他设备加入:其他设备扫描到该 IBSS 网络后,加入并开始通信。
2. 数据传输
CSMA/CA:使用载波侦听多路访问/冲突避免(CSMA/CA)机制避免数据碰撞。
无中心调度:设备之间通过协商决定谁可以在何时发送数据,没有 AP 协调。
3. 网络标识
BSSID:在 IBSS 中,BSSID 通常是一个随机生成的 MAC 地址(非 AP 的 MAC),用于标识该网络。
ESSID: ...
无线网络之WDS浅析
无线网络之WDS浅析WDS (Wireless Distribution System,无线分布式系统) 是一种无线网络扩展技术,允许无线基站之间通过无线方式进行桥接通信,从而扩展无线网络覆盖范围。以下是关于WDS的详细解析:
一、WDS基本概念WDS是建构在FHSS或DSSS技术基础上的系统,主要功能是让无线基站之间能够相互通信。它通过无线网络中继架构传送有线网络资源,可将网络数据传送到另一个无线网络环境或有线网络。
核心特点:
无线桥接:允许无线AP或无线路由器之间通过无线进行桥接(中继)
覆盖扩展:在不影响原有无线设备覆盖功能的前提下扩展信号范围
灵活组网:支持一对多的桥接方式,不同于传统的一对一桥接
二、WDS工作原理WDS系统最少需要两台同功能的AP(接入点),具体最大数量取决于厂商设计的架构。它通过以下方式工作:
信号中继:副路由器接收主路由器的信号并重新发射
虚拟网路线:通过无线网络形成虚拟的网络连接
透明传输:对终端设备而言,整个网络如同单一无线网络
三、WDS部署模式根据搜索结果,WDS主要有三种工作模式:
模式
用于主AP
用于扩展AP
具有AP功能
特 ...
Linux无线网络之Monitor模式及radiotap
Linux无线网络之Monitor模式及radiotap无线网络接口的Monitor模式(监听模式)和Radiotap是进行无线网络分析与调试的重要工具。
一、Monitor 模式1. Monitor 模式概念
Monitor mode is a passive-only mode, no packets are transmitted. All incoming packets are handed over to the host computer completely unfiltered. This mode is useful to see what’s going on on the network.
With mac80211, it is possible to have a network device in monitor mode in addition to a regular device, this is useful to observe the network whilst using it. However, not all hardware full ...
WIFI7新特性浅析及Linux内核对其的支持
WIFI 7新特性浅析及Linux内核对其的支持wifi7新特性Wi-Fi 7(IEEE 802.11be)作为下一代无线网络标准,在速度、延迟、容量和稳定性等方面实现了显著提升。以下是其核心新特性:
1. 更高带宽与速率
320 MHz 信道带宽支持连续 320 MHz 或非连续 160+160 MHz 带宽(6 GHz 频段),相比 WiFi 6 的 160 MHz 实现速率翻倍。
应用场景:适配 8K 视频流、AR/VR 等高带宽需求。
4096-QAM 调制比 WiFi 6 的 1024-QAM 多传输 20% 数据,单符号携带 12 bit 数据,显著提升频谱效率。
2. 多链路与低延迟
多链路操作(MLO, Multi-Link Operation)允许设备同时在 2.4 GHz、5 GHz 和 6 GHz 频段传输数据,降低延迟并提高可靠性。
示例:游戏或视频通话时自动选择最优频段组合。
多资源单元(Multi-RU)将不同频段的资源单元(RU)合并分配,提升多设备并发效率。
3. 增强的 MIMO 技术
16x16 MU-MIMO空间流数从 ...
嵌入式Linux添加对蓝牙的支持
嵌入式Linux添加对蓝牙的支持背景之前简单介绍了下Linux中蓝牙的整个框架:https://notes.z-dd.online/2021/09/06/Linux%E4%B9%8B%E8%93%9D%E7%89%99%E7%9B%B8%E5%85%B3%E4%BB%A3%E7%A0%81%E6%B5%85%E6%9E%90/
今天简单介绍下在嵌入式Linux中添加对蓝牙的支持。
kernel内核部分内核部分主要分2部分:模组驱动和核内蓝牙协议栈
这里以支持串口蓝牙RTL8723DS为例。
核内蓝牙协议栈在内核中添加Bluetooth子系统支持,只需打开相关配置即可,比如:
CONFIG_BT=y
CONFIG_BT_BREDR=y
CONFIG_BT_RFCOMM=y
CONFIG_BT_RFCOMM_TTY=y
CONFIG_BT_BNEP=y
CONFIG_BT_BNEP_MC_FILTER=y
CONFIG_BT_BNEP_PROTO_FILTER=y
CONFIG_BT_HIDP=y
CONFIG ...
Linux之WoWLAN无线网络唤醒
Linux之WoWLAN无线网络唤醒什么是 WoWLAN?WoWLAN 是 Wake on Wireless LAN 的缩写,中文可译为“无线局域网唤醒”。它是一种允许计算机在关闭或处于低功耗状态(如挂起或休眠)时,通过无线网络接收特定的唤醒信号(如 Magic Packet)来重新启动的技术。这种技术特别适用于笔记本电脑或其他移动设备,因为它们通常依赖于无线网络连接。
WoWLAN 是传统 Wake on LAN (WoL) 技术的无线版本。传统的 WoL 通过有线以太网实现,而 WoWLAN 则扩展了这一功能,使其可以通过 Wi-Fi 网络实现。
前面写了一篇关于WoL的记录:https://notes.z-dd.online/2024/08/21/Linux%E4%B9%8BWOL%E7%BD%91%E7%BB%9C%E5%94%A4%E9%86%92/
WoWLAN 的工作原理
硬件支持:要使用 WoWLAN 功能,需要以下硬件支持:
支持 WoWLAN 的无线网卡。
主板 BIOS/UEFI 中启用相关唤醒功能(如 Wake on PCI-E 或类似选项)。
操作系统支 ...