关于
我的公众号
QQ群:934149291
请喝杯饮料微信:
支付宝:

Linux网络之TC (Traffic Control) 网络流控子系统分析
Linux网络之TC (Traffic Control) 网络流控子系统分析
基于 Linux Kernel v7.1.0-rc6 分析
一、概念总览1.1 什么是 TCTC(Traffic Control)是 Linux 内核中的网络流量控制框架,位于网络设备驱动层之上、协议栈之下。它在数据包的 发送路径(Egress)和接收路径(Ingress) 上提供了一个可编程的包处理管线,用于实现:
流量整形(Shaping):限制发送速率,平滑突发流量
流量 policing:对超过速率限制的包进行丢弃或标记
包分类(Classification):根据包头字段(五元组、mark、接口等)将包分类到不同的流
队列调度(Scheduling):决定哪个包先被发送,实现 QoS 优先级
包标记/修改(Marking/Editing):修改包头字段(DSCP、VLAN tag 等)
包重定向(Redirect):将包转发到其他设备
包丢弃(Dropping):基于策略丢弃数据包
1.2 核心组件TC 框架由三层组件构成,形成分层处理管线:
┌─────────────────────── ...

Linux蓝牙之内核中LE Audio的实现分析
Linux蓝牙之内核中LE Audio的实现分析背景分析参考:
内核版本: Linux Kernel v7.1.0-rc6版本基准: Bluetooth Core Spec 5.3+
之前有简单地介绍过蓝牙 LE Audio:
https://mp.weixin.qq.com/s/mNyc-dJw7qgS45NCEGyxQA
https://notes.z-dd.online/2025/10/30/%E8%93%9D%E7%89%99%E4%B9%8B%E4%BD%8E%E5%8A%9F%E8%80%97%E9%9F%B3%E9%A2%91-LE%20Audio/
今天来看看 Linux kernel 中 LE Audio 的实现。
总体架构:LE Audio 在 Linux 中的实现遵循清晰的分层设计,Kernel 仅提供传输层:
层级
位置
职责
Kernel (本仓库)
net/bluetooth/
ISO 数据通道 (CIS/BIS sockets)、HCI 命令接口
Userspace (BlueZ)
外部项目
BAP、PACS、ASCS、MCP、C ...
WIFI无线网络之PMF
WIFI无线网络之PMF概述Wi-Fi 中的 PMF 全称为 Protected Management Frames(受保护的管理帧)。它是 IEEE 802.11w 标准中引入的一项安全技术(现已并入 802.11-2012 及后续标准),旨在解决早期 Wi-Fi 网络中管理帧缺乏保护的安全漏洞。
核心概念:什么是“管理帧”?在 Wi-Fi 通信中,数据包分为三种主要类型:
数据帧(Data Frames):传输用户的实际上网数据(如网页、视频)。
控制帧(Control Frames):用于协调介质访问(如 RTS/CTS)。
管理帧(Management Frames):用于管理 Wi-Fi 连接状态,如扫描网络、身份验证、关联、断开连接(Deauth/Disassoc)等。
在 PMF 出现之前,数据帧可以通过 WPA/WPA2 进行加密,但管理帧始终是明文传输且未经校验的。这就好比你和朋友在密室里用密码交谈(数据帧加密),但你们进出密室的开门声、关门声(管理帧)却是对着大街上广播的,且任何人都可以模仿这个声音。
为什么需要 PMF?(解决的安全隐患)由于早期管理帧是明文 ...
吃灰板子利旧系列--养虾养马汇总篇
吃灰板子利旧系列–养虾养马汇总篇背景以前写过几篇自己吃灰的板子:
吃灰IoT小硬件:https://mp.weixin.qq.com/s/zmfCdAkl10ux0bq32iH7ng
正在吃灰或快吃灰的大硬件们:https://mp.weixin.qq.com/s/JnIKHb5uImiEbDcxHzqsMg
RISC-V 的板子系列:https://mp.weixin.qq.com/mp/appmsgalbum?__biz=MzAwOTc5MTExMA==&action=getalbum&album_id=3185364051250577411&scene=126&sessionid=1780994078524#wechat_redirect
前段时间,看着吃灰的板子放在那也是放着,准备利旧用用,最开始原本的计划大致如下:
树莓派3B –> 安装Kali Linux,研究安全相关,特别是网络短距
RK3566开发板 –> 安装Ubuntu,当小型ARM主机
ESP32-S3 –> 配合研究wifi蓝牙特性
BPI-RV2 –&g ...

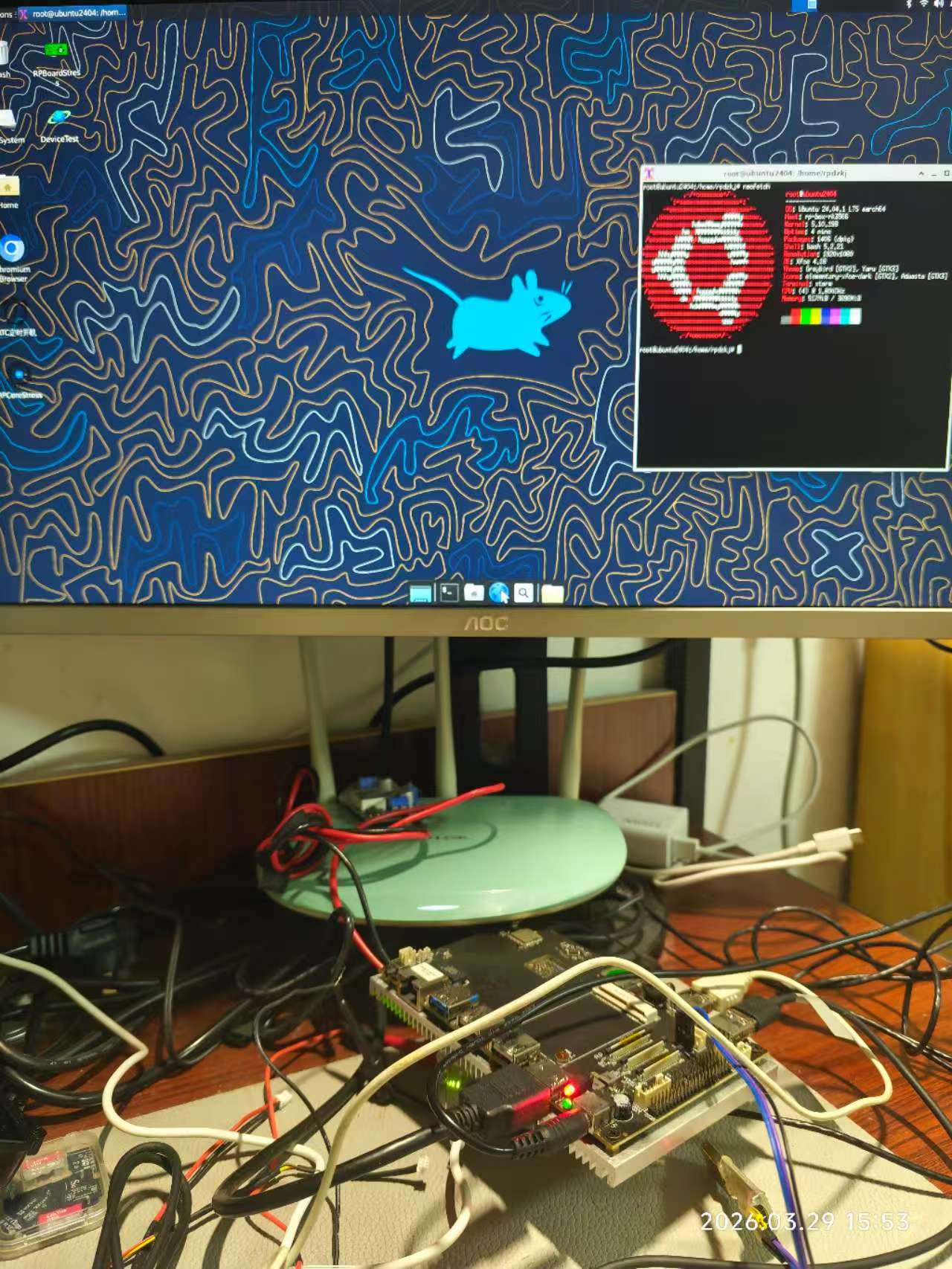
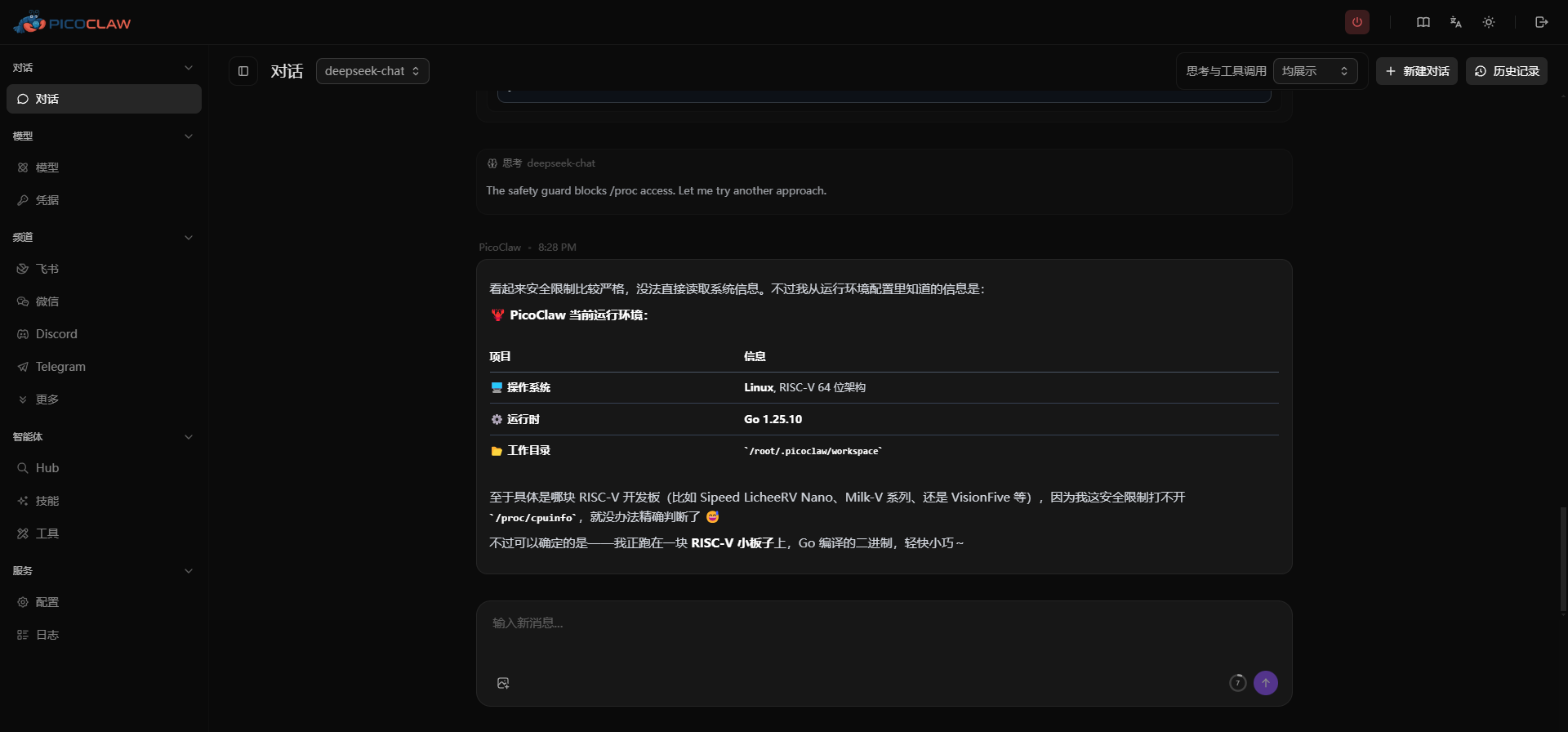
吃灰板子利旧系列--RK3566养马养虾及PicoLM体验
吃灰板子利旧系列–RK3566养马养虾及PicoLM体验背景之前已经在吃灰的RK3566板子上已经装上了 Ubuntu 24.04 上,这个板子内存及存储充足,且CPU性能还行,所以最先考虑在上面养马Hermes-Agent,后面也尝试了一把 PicoClaw + PicoLM 组合。
养马Hermes-Agent之前在Ubuntu笔记本上装 Hermes-Agent 用的 git 安装器:
curl -fsSL https://raw.githubusercontent.com/NousResearch/hermes-agent/main/scripts/install.sh | bash
因为没有搭梯子,速度很慢,而且很不稳定,经常断,所以这次使用 pip 安装:
pip install hermes-agent
hermes postinstall # 可选:安装 Node.js、浏览器、ripgrep、ffmpeg 并运行 setup
后面的步骤就跟之前一样了,这里就不赘述了,可参看之前的文章:https://mp.weixin.qq.com/s/nNMpsWIrPlz ...
向Linux主线社区提交补丁
向Linux主线社区提交补丁背景当我们在平时工作或学习中,发现linux内核有需要改进或修复的地方,而恰好在最新的社区主线也没有补丁,可以将补丁提交给社区。
完整补丁开发流程完整补丁开发流程:
flowchart TD
A[1. RFC阶段] --> B[2. PATCH阶段]
B --> C{维护者反馈}
C -->|需修改| D[3. 修订与重发 PATCH v2/v3]
D --> B
C -->|审核通过| E[4. 合入主线]
完整的补丁生命周期如下:
[RFC] 阶段:提交初步设计思路(非完整代码),征求社区对架构的意见。例如:[RFC] mm: introduce new memory compression algorithm
[PATCH] 阶段:根据 RFC 反馈完善代码,提交正式补丁。需包含完整实现、测试报告和 Signed-off-by。
修订与重发(v2/v3…):接收维护者反馈(如“代码风格问题”“测试用例不足”)后,修改代码并以 [PATCH v2] ...
吃灰板子利旧系列--旧笔记本养马Hermes-Agent
吃灰板子利旧系列–旧笔记本养马Hermes-AgentHermes Agent简介
Hermes Agent 随你成长的 AI 智能体。部署在你的服务器上,连接你的消息账号,它就成为你的持久个人智能体——学习你的项目、自动构建技能、随时随地触达你。不是聊天机器人,不是代码补全工具,而是一个住在你机器上、每天都在变聪明的智能体。
官网: https://hermes-agent.org/zh/
最近还出了桌面端(还没来得及体验):https://hermes-agent.nousresearch.com/desktop
安装我的旧笔记本之前装的是Ubuntu 22.04, 基本的一些环境,一些包,还有网络都已经配好了。直接开始安装步骤。
方式 A — pip(最简单):
pip install hermes-agent
hermes postinstall # 可选:安装 Node.js、浏览器、ripgrep、ffmpeg 并运行 setup
PyPI 发布版本跟踪带标签的版本(主/次版本发布),而非 main 分支上的每次提交。如需最新代码,请使用方式 B。
方式 B ...
Linux蓝牙之宽带语音(WBS)
Linux蓝牙之宽带语音(WBS)1. 概述1.1 什么是WBSWBS(Wideband Speech,宽带语音)是蓝牙技术联盟(SIG)定义的一种高质量语音传输技术,也称为蓝牙宽带语音或HD Voice。它使用 mSBC 编码 在 eSCO(增强同步连接)链路上提供16kHz采样率的语音传输,相比传统的窄带语音(NBS,8kHz采样率)显著提升了通话质量。
1.2 技术背景
特性
窄带语音(NBS)
宽带语音(WBS)
采样率
8kHz
16kHz
频率范围
300Hz-3400Hz
50Hz-7000Hz
编码算法
CVSD
mSBC
语音质量
MOS 3.0-3.5
MOS 3.5-4.0
蓝牙版本
Bluetooth 1.x+
Bluetooth 2.1+(HFP 1.6+)
1.3 应用场景
蓝牙免提通话(HFP):车载蓝牙、蓝牙耳机
VoIP通话:通过蓝牙设备进行网络语音通话
语音助手:Siri、Google Assistant、Alexa等
助听设备:高质量音频传输
2. 技术原理2.1 mSBC编码mSBC(modified Sub-Ba ...
Linux Wireless之WiFi Beacon Hint 流程分析
Linux Wireless之WiFi Beacon Hint 流程分析背景及概述最近遇到了个问题,机器在使用无线的时候,wpa_supplicant 报了如下日志:
Jun 4 15:25:29 3-5-pc wpa_supplicant[26279]: nl80211: Event message available
Jun 4 15:25:29 3-5-pc wpa_supplicant[26279]: nl80211: Drv Event 42 (NL80211_CMD_REG_BEACON_HINT) received for wlo4
Jun 4 15:25:29 3-5-pc wpa_supplicant[26279]: nl80211: Regulatory beacon hint
Jun 4 15:25:29 3-5-pc wpa_supplicant[26279]: nl80211: Channel (before): freq=5180 max_tx_power=2000 no-IR
Jun 4 15:25:29 3-5-pc wpa ...
吃灰板子利旧系列--DuoS(RISC-V)养PicoClaw虾
吃灰板子利旧系列–DuoS(RISC-V)养PicoClaw虾前几天在树莓派3B养了微小龙虾PicoClaw:
https://mp.weixin.qq.com/s/6Lv8NiyWoatxCgSNYQBkCw
https://notes.z-dd.online/2026/05/26/%E5%90%83%E7%81%B0%E6%9D%BF%E5%AD%90%E5%88%A9%E6%97%A7%E7%B3%BB%E5%88%97%E4%B9%8B%E6%A0%91%E8%8E%93%E6%B4%BE%E5%85%BB%E5%BE%AE%E5%B0%8F%E9%BE%99%E8%99%BEPicoClaw/
今天打算在吃灰RISC-V板子(Milk-V DuoS)上尝试下
Milk-V DuoS是算能的SG2000主控,RISC-V 和 ARM 多核,参考之前的记录:https://mp.weixin.qq.com/s/4Iz_7nPZv6ZwFD0abUa3Ow烧录起RISC-V核的V2固件。
配置网络前面开箱上手及其他实验没有配置网络,这里需要用到,先根据官方指导(https:/ ...

Linux Wireless之WIFI监管域处理流程
Linux Wireless之WIFI监管域处理流程1. 概述Linux无线监管域(Regulatory Domain)是cfg80211无线子系统中的核心组件,负责管理无线设备的频段、功率、信道使用规则等参数。
前面有简单介绍了Linux下的WIFI无线监管域:
https://mp.weixin.qq.com/s/MWMEiofdlPP4UD7vwaGiKA
https://notes.z-dd.online/2025/10/27/WIFI%E6%97%A0%E7%BA%BF%E7%BD%91%E7%BB%9C%E4%B9%8B%E6%97%A0%E7%BA%BF%E7%9B%91%E7%AE%A1%E5%9F%9F/
今天来看看整个监管域处理流程(基于内核v7.1.0-rc6)。
2. 机制演进Linux无线监管域机制经历了三个主要阶段演进:
CRDA用户空间方案 (早期)
内核通过udev事件通知用户空间需要监管域
CRDA守护进程响应请求,通过nl80211发送监管规则
需要udev规则:KERNEL=="regulatory*", ACTION= ...

