工业以太网之EtherCAT简介
工业以太网之EtherCAT简介
概述
EtherCAT(Ethernet for Control Automation Technology,以太网控制自动化技术)是一种高性能、实时的工业以太网通信协议,由德国倍福自动化公司(Beckhoff Automation)于2003年推出。
EtherCAT协会官网:https://www.ethercat.org/cn/technology.html
| 项目 | 信息 |
|---|---|
| 推出时间 | 2003年 |
| 开发商 | 德国倍福自动化(Beckhoff) |
| 国际标准 | IEC 61158(2007年) |
| 协议类型 | 实时工业现场总线 |
| 以太网类型 | IEEE 802.3 |
一句话概括:EtherCAT 是 “以太网的皮,现场总线的芯”。
典型应用领域:
- 运动控制,多轴同步
- 机器视觉,高速采集
- 过程控制,分布式I/O
- 机器人,协作机器人
EtherCAT 技术特征
设计理念
EtherCAT的核心创新在于 “飞读飞写”(Processing on the Fly) 机制:
主站发送数据帧 → 从站1读取/写入 → 从站2读取/写入 → ... → 从站N读取/写入 → 返回主站
↓ ↓ ↓
不存储转发 不存储转发 不存储转发EtherCAT技术突破了其他以太网解决方案的系统限制:通过该项技术,无需接收以太网数据包,将其解码,之后再将过程数据复制到各个设备。EtherCAT从站设备在报文经过其节点时读取相应的编址数据,同样,输入数据也是在报文经过时插入至报文中。整个过程中,报文只有几纳秒的时间延迟。由于发送和接收的以太网帧压缩了大量的设备数据,所以有效数据率可达90%以上。
关键特点:
- 从站不需要存储转发整个数据帧
- 数据帧在传输过程中被实时处理
- 单个数据帧可服务多个从站
- 极大降低通信延迟,提高带宽利用率
性能
EtherCAT借助于从站硬件集成和网络控制器主站的直接内存存取,整个协议的处理过程都在硬件中得以实现,因此,完全独立于协议堆栈的实时运行系统、CPU 性能或软件实现方式。1000个I/O的更新时间只需30 µs,其中还包括I/O周期时间。单个以太网帧最多可进行1486字节的过程数据交换,几乎相当于12000个数字输入和输出,而传送这些数据耗时仅为300 µs。对于复杂的运动控制,与100个伺服轴的通讯也只需100微秒。这种高速性能使得总线系统不再是控制回路的瓶颈。
数据帧结构
EtherCAT数据帧基于标准以太网帧封装:
┌─────────────────────────────────────────────────────────────┐
│ 以太网帧头 (14 Bytes) │
│ 目的MAC(6B) + 源MAC(6B) + 帧类型0x88A4(2B) │
├─────────────────────────────────────────────────────────────┤
│ EtherCAT头 (2 Bytes) │
│ Length(2B) + Type(2B) │
├─────────────────────────────────────────────────────────────┤
│ EtherCAT数据区 (44~1948 Bytes) │
│ 由多个子报文(Sub-telegram)组成 │
├─────────────────────────────────────────────────────────────┤
│ 帧校验序列 FCS (4 Bytes) │
└─────────────────────────────────────────────────────────────┘帧类型说明:
| Type值 | 含义 |
|---|---|
| 0x0001 | EtherCAT DLPDU(数据链路协议数据单元) |
| 0x0004 | Network Variable |
| 0x0005 | 邮箱(Mailbox) |
EtherCAT是用于过程数据的优化协议,凭借特殊的以太网类型,它可以在以太网帧内直接传送。EtherCAT帧可包括几个EtherCAT报文,每个报文都服务于一块逻辑过程映像区的特定内存区域。数据顺序不依赖于网络中以太网端子的物理顺序,可任意编址。从站之间的广播、多播和通讯均得以实现。EtherCAT不仅限于单个子网的应用。EtherCAT UDP将EtherCAT协议封装为UDP/IP数据报文,这就意味着,任何以太网协议堆栈的控制均可编址到EtherCAT系统之中,甚至通讯还可以通过路由器跨接到其它子网中。
网络拓扑结构
EtherCAT几乎支持任何拓扑类型,包括线型、树型、星型、环型拓扑(带冗余)等,具有极高的灵活性。
拓扑优势:
- 无需交换机(从站自带2个以太网口),不受限于级联交换机或集线器的数量
- 支持线缆冗余(环型拓扑),当设备或电缆发生故障时,仅需一个周期即可完成切换
- 最大支持65535个从站,网络的容量几乎没有限制
- 网络距离可达100米(标准以太网线)
环形拓扑:
高精度同步(分布式时钟)
对于需要精确协同动作的应用,如多轴同步控制,EtherCAT的分布式时钟(Distributed Clock)机制至关重要。采用EtherCAT,数据交换就完全基于纯硬件机制。由于通讯采用了逻辑环结构 (借助于全双工快速以太网的物理层),主站时钟可以简单、精确地确定各个从站时钟传播的延迟偏移,反之亦然。分布时钟均基于该值进行调整,这意味着可以在网络范围内使用非常精确的、小于 1 微秒的、确定性的同步误差时间基。这不仅保证了伺服轴的精确同步,还可以为数据采集打上精确的时间戳,提升如速度计算等任务的精度。
协议支持(设备行规)
EtherCAT应用层通过多种协议(行规)来支持不同类型的通信需求,确保了设备的互操作性和易用性。
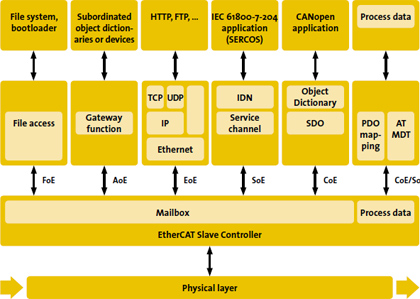
| 协议/行规 | 功能描述 | 典型应用 |
|---|---|---|
| CoE (CANopen over EtherCAT) | 将CANopen设备行规应用于EtherCAT。使用SDO进行非周期性的参数配置,使用PDO进行周期性的实时过程数据交换。 | 通用从站设备,如I/O模块、驱动器参数配置与实时控制 |
| SoE (SERCOS over EtherCAT) | 实现SERCOS驱动行规,广泛应用于伺服驱动技术。 | 伺服驱动器 |
| FoE (File over EtherCAT) | 通过EtherCAT进行固件升级。 | 设备远程固件更新、文件传输 |
| EoE (Ethernet over EtherCAT) | 将EtherCAT网络透明传输标准以太网数据。 | 连接非实时以太网设备,如摄像头、维护终端 |
| AoE (ADS over EtherCAT) | 允许从站设备像本地设备一样通过ADS访问主站或其它从站的变量。 | 设备间点对点通讯、复杂系统集成 |
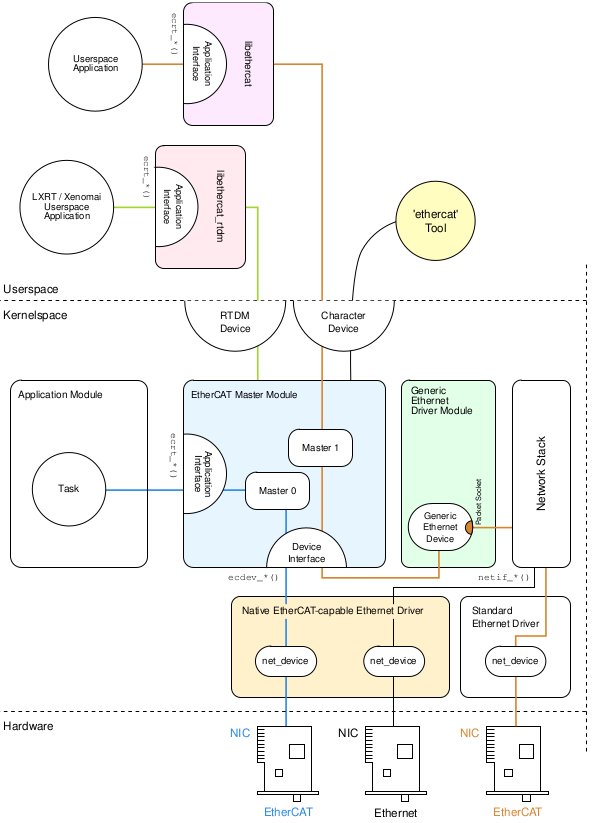
开源实现
IgH EtherCAT 是一个适用于 Linux 2.6 或更高版本的开源EtherCAT主站实现:
总结
EtherCAT作为工业4.0和智能制造的核心通信技术,凭借其高速、实时、灵活、低成本的特点,已成为全球工业自动化领域的主流选择。其独特的”飞读飞写”机制和灵活的拓扑结构,使其在运动控制、机器人、过程控制等对实时性要求严苛的场景中具有显著优势。
技术优势:
| 优势 | 说明 |
|---|---|
| ⚡ 高实时性 | 周期时间可低至100μs,抖动<1μs |
| 📊 高带宽利用率 | 单帧处理多从站,利用率>90% |
| 🔧 拓扑灵活 | 支持线型、树型、星型、环型 |
| 🛡️ 功能安全 | 支持SIL3安全协议(FSoE) |
| 🔄 线缆冗余 | 环型拓扑支持断线自动恢复 |
| 🎯 高精度同步 | 分布式时钟(DC)同步精度<1μs |
| 💰 成本低 | 无需交换机,从站硬件简单 |
随着工业物联网(IIoT)和边缘计算的发展,EtherCAT也在不断演进,与TSN(时间敏感网络)等新技术融合,继续引领工业通信技术的发展方向。
 微信
微信 支付宝
支付宝